
<ul id="q0gym"></ul> 

就像前面很多的文章提到的一樣,影像測量儀可以根據控制系統軟件的不同,可以分為手動型 的,半手動半自動的,全自動型的.正是由于這么多的不同的自動化或者半自動化功能,光學影像測量儀對其控制系統差異也十分顯著.
首先講講原始的手動型的檢測儀器吧.這款儀器的控制系統主要包括讀取光柵尺讀數.光源控制等簡單功能.這類控制系統結構簡單,精度自然也不會很高.當通過十字線瞄準測量點后,手動給出測量觸發信號,該信號通知控制卡CPU實時地讀出光柵尺的數值,計算出相應的空間位置,形成采樣坐標值X,Y,供后續的數據處理使用.對光源的控制則是通過安裝機臺上的旋鈕來簡單的控制光源的開關及亮度.
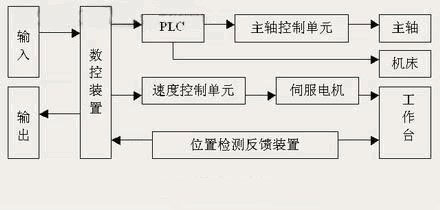
再者就是自動型和半自動型儀器.它們都是在手動型的基礎上進行有效的改進而成的.主要技術改進就是在控制系統上.也就是應運軟件上.這種系統被稱為CNC自動化控制系統,有些公司又把它們稱為伺服系統.CNC系統是由計算機來控制的.其主要運行環境就是WINDOS,部分也可以是LINUX.利運計算機來操作CNC軟件,從而發出各種人為的意向指令.其主要功能包括:讀取機臺空間坐標值,機臺位置控制,鏡頭變倍控制,光源控制,操作手柄控制.儀器狀態實時監控,還包括機臺幾何誤差實時補償,溫度補償等.
